神奇的Robotics
习惯了前两天加州的明媚阳光,今天早上起床时看到窗外阴沉的天空时,竟开始有些怀疑是否看错。踩着略湿的地面,空中飘着一些很细的水滴,叫人分不清到底是雾还是雨。据说加州一年有300天以上都是晴朗的好天气,所以遇到雨反而是小概率事件呢。乘大巴车开在前往学校的路上,我们才发现原来是起雾了,一层薄雾中的路旁的小山上的树木草地倒是越显青葱。然而当我们到达UC伯克利校园时太阳又一如既往挂在碧蓝的天空中了。

图1雾蒙蒙中向学校出发
上午我们在UC伯克利最新的一栋教学楼里上课。今天上午由三位非常优秀的博士生Laura、David和Justin为我们讲授Robotics(机器人)课程。Laura先简单地介绍了一下本节课的框架结构。她将机器人的定义呈现给我们,并将概念分成三个部分:Sensing(传感)、Intelligence(智能)和Actuation(驱动)。之后就从David博士开始,为我们讲解第一部分。

图2三位授课博士向我们作自我介绍
我们了解到,对于一个机器人而言,sensor(传感器)是它获取外界信息的途径。如同人的感官和知觉。根据信息的类型,传感器可分为图像传感器、声音传感器、加速计(位置传感器)等等。David博士以camera(图像传感器)作为例子,向我们介绍了传感器的工作原理。一个camera的主要组成部分有lens(透镜)、aperture(光圈)、CCD(成像屏)、shutter(快门)等。我们平时拍摄照片的质量就取决于这些硬件的参数,比如shutter速度决定曝光时间,曝光时间越短,越能够捕捉动态物体;CCD的材料和工艺决定ISO(感光度),aperture与shutter一起确定曝光度;lens可以让更多的光线通过光圈,同时其自身的几何尺寸决定了focus(焦距)。
David博士随后还给我们介绍了些关于通过相机技术确定机器人位置的传感器,包括Depth Camera(深度相机)和LIDAR(激光强度定向与测距,激光雷达)。这些都是现在最热门的室内定位技术及3D成像技术的核心传感器,其中的激光雷达更是自动驾驶汽车必备的传感器之一,可以说是它的“眼睛”。David博士主要就深度相机、激光雷达技术的成像原理及图像数据处理特点及难度进行了探讨,尤其是激光雷达技术。
随后Laura博士为我们讲授的是机器人智能部分的Motion Planning(运动规划)。这一部分主要是介绍机器人在已知自己的具体位置和周围环境的情况下,如何寻找出一条比较好的路径通向目的地。Laura把区域划分成Grid(网格),在这样的情况下可以把机器人假设为一个格点,机器人每次可以移动至邻近8格中的下一网格,只要一个网格中存在障碍物的一部分,就把这一个网格标记为不可到达区域,把机器人每次移动的轨迹用“树”的形式表示,在树中寻找一条从起点到终点的一条路径。寻找终点的方法有Broadth-First Search法和Depth-First Search法,我们一般称之为广度优先搜索和深度优先搜索,广度优先搜索就是优先遍历深度相同的节点,也就是从一个节点出发一步内所能到达的所有节点,这种方式的缺点是需要几乎遍历所有节点才能到达目的地。深度优先搜索就是优先遍历深度更高的节点,遍历完之后回溯到上一节点,但这种方式也不能保证很快找到终点。
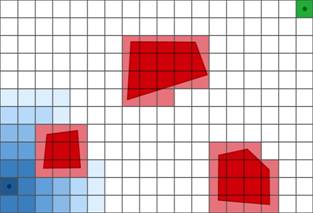
图3网格示意图与“把机器人看成一个点形成的障碍区域”的思路
但是上述两种搜索方式只能保证找到终点而不能保证所找出的路线是最优路线,所以引入了代价函数c(x)=g(x)+h(x),g(x)表示到达下一节点的实际代价,h(x)表示从下一节点到终点的预估代价,代价函数最小的路径就是最佳路径。这种算法称之为A*算法,A*算法常用于寻找较优路径。此前的情况是把整个区域看成网格,而把机器人看作一个点,但是在实际情况中并不是这样,因此要考虑到机器人本身的形状以及障碍物的形状,所以应当把障碍区域划定为机器人绕障碍物平移一圈的轨迹,这样就可以把机器人仍然看作一个点。如果还考虑机器人的旋转,则需要将机器人在各个角度绕障碍物的轨迹都考虑进去,在三维空间堆叠起来形成障碍区域。但是这样会增加一个维度,需要将空间划分为更多的网格,也会付出更大的计算代价。
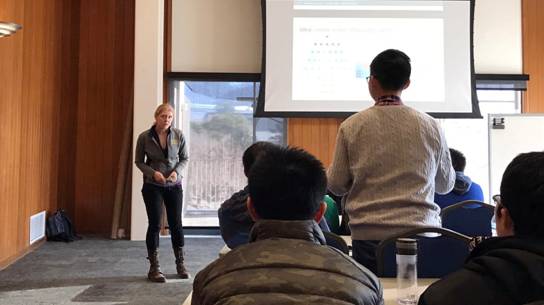
图4孙丁毅同学在课堂上向Laura博士提问
博士之后引出了Rapidly-exploring Random Tree(快速扩展随机树),不再将区域考虑成网格,从起点开始,每次随机生成一个点,如果这个点更接近于终点就把它和最近的一个点连接,但是如果这个点在障碍区域内,那么这个点就作废,重新生成下一个点。如果这个点和最近的点的连线经过障碍区域,就重新寻找可连接的其他点并将其连接。当生成的某一点落在靠近终点的某区域内,就找到了从起点到终点的一条路径。也可以从起点和终点同时出发,当两颗树连接时即找到了一条路径。
课程第三部分,Justin博士给我们带来了精彩的关于Control(控制)部分的内容,控制是将机器人的智能实现到驱动层面的方法。演讲开篇以PID控制,引入一种实际生活中最常用的线性系统控制方法。这部分内容在我们的教材《线性系统控制》中详细介绍过,但是与课本中介绍的PID控制器在Bode图中的分析设计不同,Justin用独特的一维倒立摆模型配上简洁直观的仿真界面给我们演示了PID参数的调节过程,演示了各参数对系统响应的直观效果。例如:调节Portion参数能够使误差尽快减小,但是系统的误差会大。直观反映在倒立摆模型中演示,我们会看到小车对摆杆的响应变得迅速,但是也可能过于迅速而导致小车和摆杆的运动进入一种很“疯狂”的状态。调节Derivative参数则会让系统能够预测误差的变化,直观来看,小车运动与摆杆位置状态更和谐,如果P、D参数得当,摆杆可以在一个很小的固定角度稳定,但不足之处是小车仍然会以匀速运动而不会静止;调节Integral参数可以让小车的速度收敛,就可以解决上面只有P、D控制的小车在稳定状态匀速运行的问题,使得摆杆状态最终能够通过控制小车的运动保证竖直静止不倒。如何将所学的数学方法和现实问题结合起来一直是中国大学生们的难题,因为我们的学习往往是以考试或是以能分析数学问题为最终目的,而不是以解决实际中的问题为原动力。Justin博士的生动讲解让我们受益匪浅,感触良多。
随后,Justin更进一步给我们介绍了quadcopter (四旋翼)的简单模型分析。分析四旋翼问题并没有四旋翼本身那么有趣,但在工程上使用一些巧妙的近似方法总是能让一个复杂的问题变得清晰,甚至在课上用三言两语就能解释清楚四旋翼飞行器的基本飞行运动原理。但是在学术研究领域并不能止步于此,为了向我们介绍对四旋翼精确建模能做到的效果,Justin给我们展示了关于四旋翼特技飞行的视频。视频中,工程师利用精确建模实现了更加夸张的飞行动作,从而让四旋翼飞行器能够适应更多的环境,完成更多的任务。更精确的飞行模型很大程度挖掘了飞行器的潜力,但同时也带来分析和运算复杂度的提升。根据不同的使用场合,使用不同简化程度的模型对问题进行分析,这是一个工程师能够高效解决一个新问题的策略。

图5 Justin博士在给大家讲解控制的概念
Justin博士还告诉我们,在机器人研究的创新过程之中,我们往往需要从自然界的生物身上寻求灵感。因此,在介绍Bio-inspired robots(生物灵感机器人设计)的环节时,Justin博士展示了大量的视频与文字,让我们能更加直观的了解到自然界中各个物种究竟为我们科技的发展与进步带来了怎样的影响。Justin博士通过播放视频,从猎豹、壁虎、蟑螂、蜂鸟、蛇类等角度介绍了人类在它们身上所获得的启示与遐想。

图6 Justin博士在介绍仿生机器人
例如,科学家们通过研究壁虎的吸力手的原理,研制出可以在一切环境下爬行的吸力手。在每个吸力手上,都有数百万根由人造橡胶制造的“细毛”,每根细毛的直径大约只有500纳米,比人类的毛发还细很多,每根这种“细毛”的长度也不到2微米,这使得“粘人”的吸力手能非常接近玻璃壁的表面。仿壁虎机器人就此而诞生。再比如,猎豹不仅拥有锋利的爪牙,更拥有令人惊叹的速度。作为食物链顶端的一员,猎豹有着比现代最好的跑车还要惊人的爆发力,它能在两秒内达到60公里/小时以上的速度,其中的奥秘在于猎豹身体的独特构造:流线型的身体极大减小了空气阻力,紧密的肌肉结构大大增强了猎豹的瞬间力量。科学家们就此得到启发,将之应用于机器人的设计之中,使得机器人有望在不久的将来变得更加敏捷。
此外,波士顿科学家通过研究蟑螂的腿步结构而研制出能够在各种环境下行进的救援机器人Rhex;日本科学家通过研究蜂鸟挥翅的情况发明了飞行极为稳定的蜂鸟机器人;人们还通过研究蛇在水陆的行进方式从而研制出仿蛇机器人。
课程的最后,三位博士播放了一段视频,是在测试机器人的过程中各种失误现象的集锦,大家看得纷纷笑出了声,但是在笑声的最后,Laura博士非常严肃地告诉我们,机器人研究目前还存在很多的问题,这也引发了在座很多同学对机器人学习的兴趣。大家最后用热烈的掌声感谢他们讲授的这堂精彩课程。
吃完午饭后,同学们跟随带队老师一起实地参观了美国十大商学院之一的UC伯克利Hass(哈斯)商学院。商学院里浓厚的创新创业学术氛围,通过楼内张贴的各种会议传单和通知栏里的各种讲座信息透露了出来,看似随意却有着强烈的学术冲击力。

图7参观UC伯克利Hass商学院
下午是一位来自台湾地区的学长给我们作经验分享和解答问题。这位学长语速极快地介绍了他的履历,接着,同学们在AI和机器视觉方面提出了很多问题,他都幽默风趣而精准的给出了回答。整个答疑过程大家热情十分高涨,临近下课还有很多问题希望和他探讨,但可惜时间已经不允许了,最后的一小时,大家还要分组讨论各自小组的课题。直到带队老师再三催促,大家才依依不舍离开教室。

图8 UC伯克利的华人学长介绍他目前课题和实验室导师
这是非常充实的一天,课堂质量相当高,课程内容也很有难度,但不远万里来到这里的我们正是渴望获取这样的挑战和知识,也希望今后的学习中还能够保持这样的热情,让这一次旅程给自己一个满意的收获。

图9午后,同学们在青翠的草坪上休息与交流

 华中大启明学院
华中大启明学院
 创新创业华中大
创新创业华中大
 华中大创客空间
华中大创客空间