王泽
这周主要是在富生学长的带领下学习新的实验方法,以及独立操作实验。
周一一天,完成的主要是方案的讨论和样品的制作方法。首先学习的是测试样品的制作方法。由于一开始我们要用的Vis-UV的光谱仪是固定单点发光的老式一点的仪器,所以需要把样品固定在玻璃的特定的位置。
首先做固定的溶液,PDMS(有机硅)。PDMS是我们自己配的,两种溶液按照一定的比例混合,然后搅拌,静置等其干就可以了。用PDMS主要有两个方面的原因,第一,PDMS的特性导致不会有太多气泡存在其中,都会浮上来,在表面的气泡轻轻一吹就好了。原因二:这种物质不会吸收光谱成分,不会产生新的成分,这样不会影响。所有用这个做一个胶水的固定成分。

这个是做好的合金样品的样子
把PDMS滴到合适的位置,sample放上去之后,把其放在加热台上5-10分钟,加热使PMDS快速变硬。
第二步,我们到了cleaning room(无尘室)做etching the surface的处理。这也是第一次去无尘室,感觉比较新鲜,要穿防护服和带手套,也是第一次把自己都穿成白大褂的样子。这次我们去主要是要用到etching machine。用加速的Ar原子轰击样品,达到去除表面未知成分的作用。在无尘室里面看到了很多好玩的仪器,都十分有趣。


在无尘室里面的样子,第二张图片的仪器,是他们自己搭建起来的,真的很厉害。
在无尘室里面做好了,下一步就是去surface lab用vis-uv光谱仪来测其反应的光谱。这个主要用的范围就是那个从可见光到紫外。这个星期我们用的这个仪器比较老,分辨率只有1nm,但是是目前可以预约到的实验,下个星期就可以用我们自己系统来做了。
我们最开始用的vis-uv的扫描仪
一开始的时候是学长做,然后我在观察学习,有什么问题就提出来,学长还是很细心地给我解释。第二次,就是学长指挥我做,我来熟悉步骤。第三次,就是我自己完全独立完成。看似比较简单的实验,只有你真正做了之后才发现有些细节是教不了的。比如有几次,我就总是搞忘记样品放的方向,然后测出来的曲线总是错的。之后,就是自己独立做的时候,会比较急,很多东西没有处理好,希望可以处理好。Ossuma也很友好,安慰了我很多,叫我take it easy。还有几次,我把溶液都弄出来的,但是他们都比较细心地教我。虽然有的时候他们会比较严厉。

我自己做实验的时候的桌面,需要的东西都在上面。
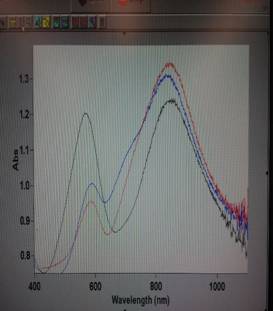
测出来的部分曲线:

下个星期就要用SERS那套系统了,希望再接再厉!
黄煜
这周开始休斯顿的温度就继续攀升,为了保持室内的温度恒定华氏76度左右,工程楼里面的空调开得更冷了。我周一早上满头大汗地跑到工程楼里面,结果发现实验室的门没开,然后就到一楼大厅坐着边看论文边等。后来回到实验室里面就突然觉得好累,怎么喝咖啡也累,我判断为中暑了,估计是大厅的空调开得实在太冷了。还好没出现其它不好的症状,我下午就直接回去休息了。
本来计划周一的时候写一篇paper review的,结果中暑拖了进度,周二要完成两篇。借鉴周一的教训,我很早起来就在住的寝室楼里面的study room看。上周以及上上周都各写了一点paper review,但是当时还没有对项目整体有一个把握,只能大概的说我所控制的是一些双轮车。但是基于上周学到的东西,现在我可以知道,我涉及的是under-actuated system,也就是说它的控制输入变量数小于系统可以被控制的自由度。并且我们的目标是让系统通过一些motion primitive(基本运动)来是它做到一些看似不可能的运动。
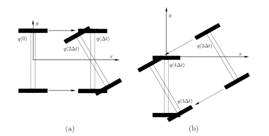
图一[1]
例如上图中抽象出来的独轮车必须满足和地面没有相对滑动的约束,所以不可能沿着Y轴方向平动。但是通过一定的运动循环可以做到这个Y轴平动。原理类似于我们开车把车从一个车位停到另一个平行的车位上。
我们当然还会涉及到如何给出控制信号的问题。Aaron的研究方向是群体控制,并且实现这个只用一个信号。也就是说所有的机器人个体都收到同一个信号。根据我之前的了解,采取这种思路的具体实现方法数不胜数但是大体思路都是一样的,那就是用这个信号来构建某种场,然后机器人在场里面的相对位置不一样,运动方向也不一样。Aaron以前试着用一个信号控制磁场来实现这个,这种方法的计算开销很小响应快但是不够灵活,难以实现轨迹控制。我看到很多论文的实习想法不一。比如下面这个例子就是把机器人看成粒群,然后抽象成质量连续系统。
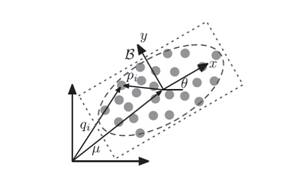
图二[2]
每个灰点代表一个机器人,实现这个系统需要一个全局观察者来确定每个机器人在世界坐标系的坐标,通过收集每个机器人位置确定局部坐标,坐标原点相当于是一个假象的“质心”。为了实现形态控制,论文里面还定义了一个能量状态函数,从而实现用这个来模拟简单可压缩连续体的形态变化,并且可以用来穿越障碍物,就像章鱼一样:
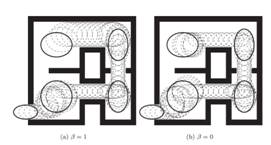
图三[2]
这周周四终于写完了所有的paper review,然后下周一就可以填表拿钥匙了。
引用来源:
[1]“System Theory and Analytical Techniques Steven”,M. LaValle Copyright Steven M. LaValle 2006
[2] N. Michael, V. Kumar,“Planning and Control of Ensembles of Robots with Non-holonomic Constraints”. The International Journal of Robotics ResearchJune 26, 2009
程天舒
上周虽然基本完成了轮廓检测部分的程序,但对于一张100*149的图片跑完一个程序需要十多分钟,程序跑到求解14900阶矩阵的本证方程时,根本的不出结果看不到输出的本征值向量,无法继续执行下去,为了方便测试程序,如何提高程序的执行效率缩短运行时间成了本周重点。
周一一大早,Doctor Mayerich一见到我就提了一个他昨天刚想到的求取图像关系矩阵的简便思路。所谓关系矩阵是一个阶数(边长)等于像素数的方形矩阵,每一个元素的横纵坐标分别对应图上的一个点,该元素的值与轮廓概率图mPb上两点间连接线段(线段长度)上的像素点的mPb最大值成反比,称为关系指数,关系指数越大说明该两点越相近,越有可能属于同一块区域,反之亦然。例如下图中i、j两点之间有一条界线(轮廓),则两点之间的连线上的mPb最大值很大,接近于1,这时该两点在关系矩阵对应的关系指数就很小,说明两点位于(接线两侧)不同的区域,相比下,i、k两点的关系指数较高。之前获得关系矩阵的方法是采用最简单的遍历思路,即用for循环求出任意两点间的关系指数,但for循环是串行计算,一个完了接下一个,当循环数量很大时(此处需要图片像素数的平方次循环)极其耗时。

关机矩阵说明图
Mayerich的思路是通过平移矩阵计算两点间最大值,用并行计算取代串行计算。例如,如果要计算图上每个像素点与其正下方四个像素点中的最大值时可以依次将图片向上平移,每平移一个像素用matlab的max函数求取平移前后两矩阵同一位置处元素的最大值,如此平移四次后即得到整张图片所有像素点与其正下方四个像素点中的最大值,相当于在同时对每个像素点进行计算,即并行计算。Matlab所擅长的矩阵运算以及各种矩阵运算函数都属于并行计算。
虽然在刚开始听导师讲思路时,不知是导师略带兴奋语速过快还是我的大脑还没彻底苏醒,我大概领悟到了平移的妙处,但具体如何做卷积还是似懂非懂的,在之后导师进行第二轮更细致的白板画图讲解和自己消化理解一上午后终于茅塞顿开将思路转化成了代码。果然,并行计算的效率就是高,关系矩阵的计算从之前的十几分钟得不到结果“剧变”到现在跑481*321的原图也只要不到一分钟。
之后又在导师的点拨下将本征值方程中的极大参数矩阵先压缩成稀疏矩阵再让matlab计算本征值,终于,在一阵补偿的计算后如愿得到了本征值向量。如前所述,我们需要求解的本征值方程中的参数矩阵极其大,但实际上参数矩阵是关于对角线对称的稀疏矩阵——除了对角线上及附近对称分布的元素外,其他大部分元素均为零,但有用的信息都在非零的元素里。于是matlab中有一个sparse函数用来压缩稀疏矩阵,通过记录坐标的方式仅仅保留稀疏矩阵中有用的非零元素,大大降低内存空间提高运行速度。例如,如果一个10*10的方阵中只有坐标(1,1)处有一个元素1,其他均为零,则sparse函数仅会记录非零元素1的坐标和取值,而不存储其他99个0的信息。
当关系矩阵和本征值的问题解决后,耗时的“大头”又变成了算法的第一步——求梯度,受到并行计算的启发,我开始思考如何将求梯度过程中的串行计算也用并行计算取代。这里的梯度是paper自己定义的一种新算法,以某一像素点为中心做一正方形,梯度的大小等于正方形下半部分的点的像素值的和与正方形上半部分的点的像素值的和的差,虽然按照paper的建议用integral image(积分图)简化了计算,但还是得one by one的计算所有像素点,有什么办法对所有点进行同时计算呢?卷积的思路再次蹦入脑海中,可以构造一个上半部分是-1下半部分是0的滤波器,与原图进行卷积的结果不正是我们想要的吗?而且matlab有现成的两个二维矩阵的卷积函数,运算速度很快。于是我果断抛开paper所建议的integral image按照卷积的思路重新修改算法,保存,运行,紧张的等待,和原方法几乎一样的结果图在极短的运算后如愿弹出在屏幕上,一统计时间,比原方法快了40倍!
优化后的程序运行时间统计
程序运行的时间一再骤减,一个个高效的新算法使算法的执行速度不再是瓶颈,然而新的问题出现了,out of memory(内存告急)!求解本征值方程的第一步是构建关系矩阵,先初始化一个以像素数为边长的全0方阵,然后将一个个关系指数填进去获得关系矩阵。然而,当采用481*321的图片时,关系矩阵的大小即总像素数的平方为23Gbytes,已经超过了16G的内存,matlab提示out of memory无能为力,内存溢出的问题困扰住了导师和我。问题的关键在于系统没有足够大的内存来存放巨大的关系矩阵,而实际上关系矩阵中大部分是无用的零元素,那是不是能够仅仅用非零元素来构建关系矩阵呢?似乎在曾经用过的sparse的函数中有过这么个用法,于是我立马打开sparse的帮助手册,果然,sparse可以将稀疏矩阵转换成坐标形式,也可以由非零元素的坐标构建稀疏矩阵!这样一来,系统就只需要存放非零元素坐标的空间,那显然是绰绰有余的。
经过导师周一提出的并行计算思路的启发,之后的每一天我都努力用一个并行算法替换掉一个费时低效的for循环,周四我有用reshape函数加快了texture channel的计算,至此,对一张481*321图片跑完整个程序只需要148秒。导师说,之后我们还能够运用GPU并行计算进一步加速。
周五,与导师讨论了一下后续阶段的计划:学会用precision-recall曲线衡量轮廓提取算法的效果,并用data base对算法进行训练得到效果最佳的参数。
轮廓提取成运行结果
体验的完善
程序完善的同时,美式生活的体验也在一点点补充完善。8.7-8.9是一年一度的德州免税日,100刀以下的衣服鞋子等商品统统免税(德州税率8.25%)。周五晚上和李慧晗、韩聪搭Uber来到期盼已久的China Town买到了日夜思念的速冻饺子、速冻馄饨、“宅男女神”(引自黄煜)老干妈、榨菜、腐乳等中国特色,既是回味家的味道,也是为了应付我们即将搬入的没有厨房只有junk food的新宿舍——Moody Tower。从中国超市一回来,纵使疲累,大家也迫不及待的投身厨房煮饺子,老干妈开盖的一刻,那熟悉的辣味刺激到鼻腔令海外游子有种热泪盈眶的感觉。

China Town的中国超市
周六下午,趁着刘景深学长的便车和熊诚黄煜一行来到车程30分钟外的Galleria凑免税日的热闹,Galleria估计是我至今见到的规模最大的shopping mall,无论衣服、鞋子、手表、电子产品、化妆品,从平民级到奢侈品级的应有尽有,你能想到的都能在这找到,你想不到的也会在这出现:例如,我第一次见到的特斯拉。晚上,在China Town一家名为“顶好小吃”的台湾小吃店吃晚饭,小小的饭店,老旧传统的陈设,留声机时代的歌曲,大家似乎一下子走进了3、40年代的旧上海,与下午Galleria的现代化气息形成的严重反差造就了穿越时空的美妙错觉。


Galleria的特斯拉体验店
来美一个月,程序在完善,体验在完善,衣食住行基本都有了满意的解决方案,快速的适应也折射出美国的多元与包容。希望在不断完善中继续遇见更强的自己,更大的美国。
李慧晗
这周主要看了Jeff给的一些关于exoskeleton的论文,里面有许多关于robotic exoskeleton的控制系统的内容。我在之前学过一些关于控制的内容,但是不深,很多地方不明白,比如如何理解Impendance control,以及关于Finite state machine的一些内容。在跟实验室的师兄探讨之后,发现很好理解。Impendance control可以使康复患者的四肢按预定的reference trajectory运动,同时也允许与reference trajectory有一定的偏差,以防止施加在康复患者的力过大,引起伤害。
周二的时候,实验室两个快要走的访问学者将怎么操作Rex的整个流程都交给了我,包括准备EEG头套,使用digitizer,怎么调节Rex的ankle, knee, hip三个关节之间的距离,怎么在Rex行走过程给予适当调整等等。现学现操作把整个过程都了解了一遍。整个一套实验坐下来将近花了整整一天。

图 实验时的照片
周末的时候请曾琦学姐和刘景申学长吃了一顿我们自己做的“大餐”,每个人都做了一道菜,十分丰盛!

熊诚
度过了第一周的过渡期,第二周算是正式地进入实验室学习了。当然一切都得从最基础的知识开始学习适应,由于我所在的实验室是化学实验室,所以一切化学实验室的基础知识和操作规范变得尤其重要。自己也得不断地从网上和书籍上自学一些基础的化学知识,学习的过程中有很多需要克服的苦难,比如语言障碍,还有两个语言之间意象的转换困难,但是一旦你开始认认真真地投入了,所有的也开始变得简单了。
这一周在实验室大概了解我所在实验室的玻璃仪器和各种化学试剂的英语表达及其在实验室的位置,自己还了解了实验室的软件实验平台Nova,其实实习期间,我感觉更多的是观察学习,因为没有人会主动教导你,主动push你,一切得自己主动去做,我们实验室这一周也来了一个伊朗的小哥,人很活跃,语言能力也很强,相比较而言,我们的语言水平还是不足,需要提高。当然在实验室学习也是一方面,作为实习生,文化的交流也是同等重要的,伊朗小哥就向我们介绍了很多他的家乡和他的兴趣。
娱乐方面,我们这一周又去了Walmart,星期五晚上曾琦学姐带我们看了Mission Impossible 5,阿汤哥还是依旧如此酷,看电影前顺便吃了一个中国菜馆,感动到流泪,由于这一周有几天免税日,我们星期六下午去Galleria买了很多东西,第一次在美国看到一个地方有这么多的人,有种中国商场的即视感,顺带看了看TESLA,不得不说略屌,可远观而不可近玩焉,一个下午的逛街还是把我们困成了dog,当然我们最后还是在一家台湾小馆吃了东西,只能说满足了。
在德州这个荒无人烟的地方,每周能够坐着学长学姐的车兜兜风便是一种享受,星期天变老老实实待在宿舍,看看书,做做饭,这个周末还不错。
韩聪
周末电脑跑了20多小时的程序,在周一我得到了所设计的几块钉板的result。发现其中的peak sar非常规律。这既让我高兴又让我担心,高兴的是如此规律,那么数学模型一定是可以建立的,但是由于数据波动非常小,我担心这几乎没有普遍性。
接下来就是把数据提出来了,在郑博士的指导下,我开始自学Python语言,结合一些SEMCAD的示例脚本去学习。熟悉了基本的语法后,我开始照葫芦画瓢,学着提E场的方法,把SAR场给提了出来。经过和郑博士商讨,我们决定提出Grid,因为其包含更多的信息。但是在提Grid的时候发现老办法不行了,因为它们的数据形式有些差异。纠结了很久,我开始加深对Python和SEMCAD函数库的学习,因为光照葫芦画瓢不行,我必须得自己独立写一些东西。这次的“攻关”比预想的时间要长很多,我用了几天的学习在学习写代码。最后在熊博士的代码实例中我受到了启发,决定用遍历的方法去提Grid。经过磕磕碰碰,终于把它提出为.mat文件,但却发现只能区分boundary,shell ,gel , pec材料无法得知,所以现在又在思考,是程序有问题还是提Grid的方法不现实,虽然现在问题还没解决,但是我对Python语言,面向对象语言有了进一步的熟悉。
在生活方面,我们比以前更熟悉了,不会再迷路,吃饭也会很容易找到地方,生活过的很规律。在周末,和几个同学去了中国城买了速冻水饺,老干妈等中国食物,沾几个大厨的光吃上了热腾腾的饺子,感觉很幸福。
叶庆莹
这周开始我们正式步入实验室生活。Professo Ogmen是这次实习中我的导师,他主要的研究方向是reverse-engineering中的neuro-engineering,尤其是人类视觉系统的研究。
这次实习,Ogmen教授主要给我的任务是学会心理物理学实验的计算机编程以对视觉感知、视觉记忆以及决策等模型的模拟等。我跟着实验室的师兄Boris参观了实验室的大概情况,正好作为被测试者进行对视觉记忆的实验。实验是师兄设计的,被测试者盯着屏幕上的三个圆中中间那个,但attention到其余的两个圆。每个圆中有7个小棒,都具有不同的方位。每一次我需要记住中间圆的小棒的方位,这段时间会有很多干扰,比如快速移动的三个圆。然后屏幕上只留下一个圆和一根小棒,而我需要把这个小棒的位置还原到我之前看到的位置上去。整个实验是为了探索视觉暂留和视觉记忆的关系,实验由于参数不同,可以分为多种,比如三个圆移动的速度、圆棒的个数等等。就我自己的实验经验来看,有很多是自己的视觉盲区,比如看一个圆,很难做到兼顾整个方位的小圆棒。虽然有很多时候是我蒙的,但这的确是我脑海中的第一反应,因此也是有价值的。

这周抽空去了学校的建筑学院,整个建筑学院非常恢弘,外形像是一座教堂,内上是一个大穹顶,里面装饰华美,大厅中是一个木头搭建的建筑,结构精巧,纯手工搭建,非常漂亮。两边是楼梯,沿着上楼,我们看了许多建筑学院学生的作品,在4楼还有建筑学院与NASA合作的办公室,这下面放了2张成果展示图,可以看出身在NASA附近的休斯顿大学确实有很好的机会和实力,建筑学院虽然主要是建筑设计类,但在航空航天上,对太空飞船舱的设计,对火箭结构的设计也会有他们一展宏图的地方,这样的成果让人惊叹。

我们在周二开了一次组会,教授Ogmen亲临指导。Boris师兄就Afterimage的相关paper做了一个整体的review,期间Ogmen非常有耐心的指正了师兄一些小错误,师兄也乐呵呵虚心接受,整个氛围融洽,相关术语比较多,我听的不是特别懂。但是每次师兄都会询问我是否知道这个概念,如果我不懂一定会用简单地语言解释道我懂为止。非常感谢师兄和Ogmen的细心。
储晓青
工作方面:这一周的主要任务是阅读关于二维MoS2材料和超级电容器的论文,了解制备1T相MoS2的实验过程和制作及测试超级电容器的方法。导师要求我写出具体的实验步骤和实习计划及目标,并且要将实习计划做成PPT,这也是对今后工作的一个指引。
另外,美国的大学规定在开始做实验之前必须经过safety training,以减少实验中不必要的错误操作带来的危害。在这个网络培训课程中,令我印象最深的一句话是“大楼可以花钱再建造,但是生命不可能用钱买来”,由此可以看出美国人对每一个个体生命的重视,注意实验安全的确很重要。我所在的实验室里也都配备了课程中介绍的各种安全设备和急救器材,比如做化学实验用的通风橱,急救医疗箱等。
生活方面:这周末正好赶上了免税日,所以学长带我到公寓附近的Ross超市逛了一下。这个超市主要是卖打折的衣物、鞋子以及各类家居用品的。另外我们还去了Kroger超市购买了后面一周的食物。这个超市的一个特点是客户自助结账付款,这里有自助式的扫码机器和称重机器。自助付款不仅节省了商家雇佣收营员的费用,也在一定程度上节省了消费者的时间。这让我领略到科技对便捷生活的促进作用。
戴政泓
转眼间,我们来休斯顿大学实习已有两周的时间了,新奇感渐渐褪去,生活也逐渐规律。这周,初步了解了一下我的课题的发展趋势,虽然二维硫化物材料具有广泛的应用前景,比如催化,电子器件和半导体材料等等,但是要合成高质量,单层,大面积的单晶样品确实不易。
这周做了3次化学气象沉积实验,结果并不理想,第一天的样品都聚集在了一起,并没有形成想要的薄膜。第二天由于硫气氛引入时间过晚,导致没有MoS2形成。而第三天只得到了一些MoS2纳米颗粒。我和Romel讨论了一下得出:既然得到了纳米颗粒下周就有两种方法做进一步尝试,第一种可以以现有的颗粒作为形核点,利用相同的方法看看能不能在形核点周围长出薄膜。第二种就是控制其他变量,延长反应时间,减缓升温速度,让MoS2有足够的时间在基片上扩散。另外,这周四的时候,我的导师总算回来了,由于还在倒时差的原因只是和我匆匆见了一面,看来下周还要找他好好聊聊。
周六,Romel要做石墨烯的合成,我正好没什么事,也就去实验室加个班打个下手吧。傍晚的时候,诸学长带我去了超市买了些生活用品,顺路去了Rudy’s一家墨西哥式的烤肉店,喝了瓶德州黑啤,大口吃肉大口喝酒,有一种在国内撸串的感觉,度过了难忘的一晚!

 华中大启明学院
华中大启明学院
 创新创业华中大
创新创业华中大
 华中大创客空间
华中大创客空间